


I mange frekvensomformer findes der i dag en STO (Safe Torque Off) funktionalitet, men hvordan kan man bruge denne? Og hvorfor er det en god ide at bruge denne funktion? Med denne artikel vil jeg prøve at forklare nogle af de vigtigste punkter omkring denne funktion.
Som et alternativ til kontaktsæt, hvor man typisk fjerner forsynings spænding til frekvensomformer eller motor, kan man med STO bibeholde forsyningsspænding til frekvensomformer.
Fordele ved brug af STO i frekvensomformere:
- Frekvensomformer har typisk kondensatorer der skal lades op ligesom batterier. Det gør en hurtig genindkobling umulig, da disse først skal lades op før drevet virker igen. Et elektronisk sikkert stop gør det muligt at bibeholde hovedforsyningen på omformeren, således at man meget hurtigt kan genindkoble sit drev efter et nødstop. Desuden så er det muligt at bibeholde bus kommunikationen til enheden, så det stadig er muligt at håndtere diverse data fra drevet.
- Desuden så er der en del besparelser i form af komponenter, for at opnå PLe skal der som minimum altid være 2x kontaktorer for at koble motoren fra. Disse to kontaktorer kan spares væk hvis man vælger en frekvensomformer med STO funktion der kan overholde PLe.
- Mindre dokumentation, takket være hjælpeprogrammer som SISTEMA hvor mange leverandører har filer til.
- Mulighed for stop kategori 1. Det vil sige at det er muligt at bruge frekvensomformeren sammen med eventuelle bremsemodstande til at stoppe en farlig bevægelse.

Forklaring på sikkerstop kategori 0, 1 og 2 i frekvensomformer
Omkring sikkert stop (SS0, SS1 eller SS2) findes der 3 forskellige stop kategorier man kan bruge i forbindelse med drevløsninger. Herunder lige en forklaring på hvad de betyder:
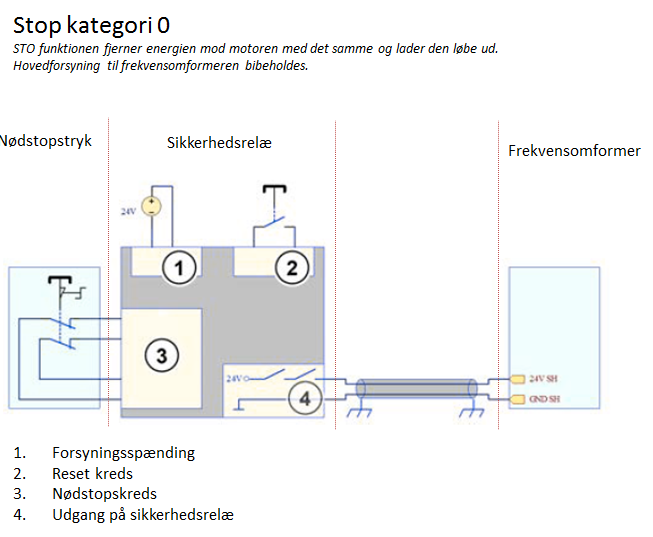
Kategori 0: Er en stopfunktion hvor vi blot fjerner energien ud mod motoren, således at motoren går i frit løb. Denne funktion vil typisk kunne bruges i applikationer hvor den farlige bevægelse ikke er tilgængelig før den har roteret sig ud. Har man en stor inerti skal man sikre sig at rotationen er ophørt inden man får adgang til denne.
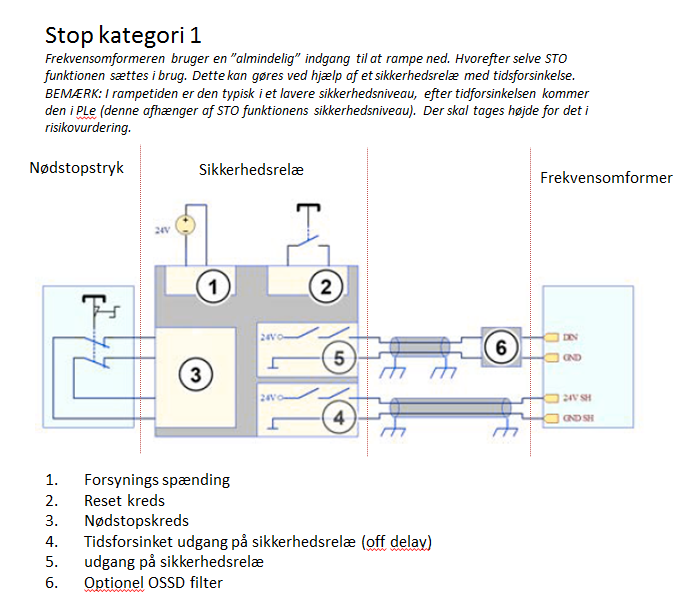
Kategori 1: Her bruges f.eks. frekvensomformeren aktivt for at formindske ens stoptid betydeligt. Det vil sige at man kan bruge en nedrampning hvor energien fra bevægelsen kan bremses aktivt ned ved hjælp af en frekvensomformer eventuel i kombination med en bremsemodstand. Det er også muligt at bruge en mekanisk bremse her, denne skal dog være egnet til dette. Efter aktiv nedbremsning skal energien til drevløsningen fjernes. Det gør det muligt at nedsætte bremsetiden markant.
Kategori 2: Typisk ville man have en overvåget bevægelse. Her vil man ligesom i kategori 1 stoppe den farlige bevægelse så hurtig som mulig, med den forskel at der så bibeholdes spænding ud mod motoren med f eks 0Hz. Denne funktion giver mulighed for meget hurtigt at genstarte produktionen, da drevet er klar til at køre. Denne stopkategori kan dog være meget dyr at etablere da dette typisk kræver en omdrejningsovervågning der kan overholde det påkrævede sikkerhedsniveau.
Skrevet af: Paul Klöcker – Product Manager Electronics, FS Technician #163/14 (TÜV Rheinland), NORD Drivesystems Danmark






